Helix9 G3N Mdi
Ultrex with IPilot/Link
Mega 360
I have the Mega360 all installed, powered everything up, started going through the instructions on setup.
I printed the instructions and on page 36, they have you confirm connections. One of the things they have you check is the heading sensor, which I installed a few weeks ago; but it's paired with the Ultrex, not the Helix (or is it subconsciously connected through the Link?) or does this take more time to recognize than I gave it maybe?
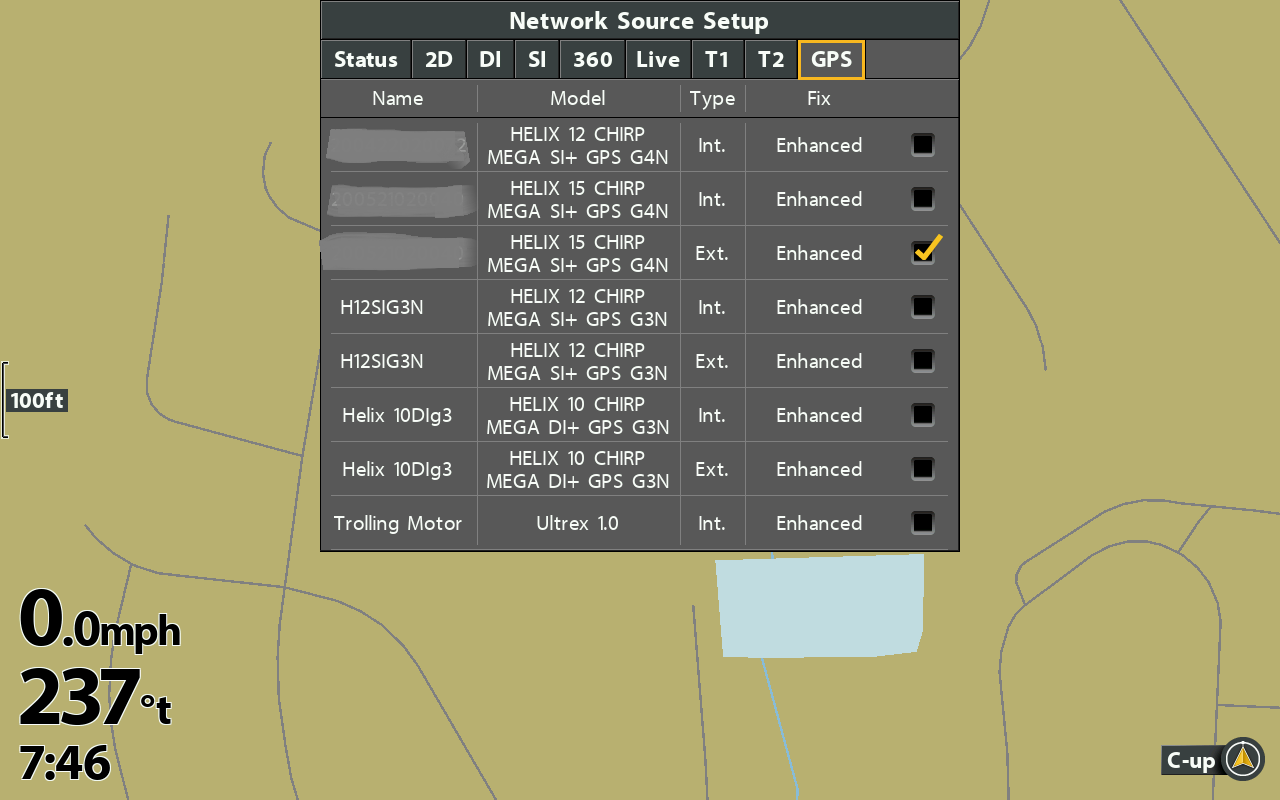
The other thing I ran into was it had me check which type of GPS; it wants External but mine shows Internal. In Networking, I have my Ultrex selected as my GPS source. Again, did I not wait long enough for these items to be recognized?
Thanks for ideas!



 Reply With Quote
Reply With Quote